| Citation: | LIU Yuan, YAN Zhe, GE Ruipeng, CHENG Qian, MING Dong. Quantitative Analysis and Optimal Design of Grasp Augmentation of Supernumerary Robotic Finger Based on Pose Solving[J]. ROBOT, 2025, 47(1): 32-43. DOI: 10.13973/j.cnki.robot.240080
 |
Quantitative Analysis and Optimal Design of Grasp Augmentation of Supernumerary Robotic Finger Based on Pose Solving
-
-
Abstract
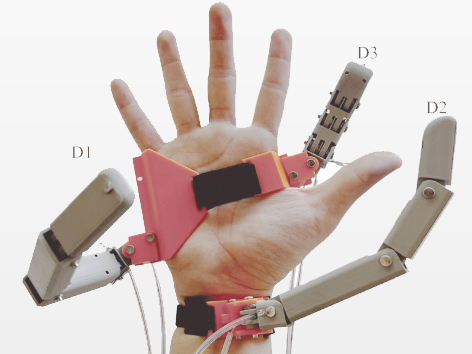
Supernumerary robotic finger (SRF) is a wearable robot that achieves motion enhancement by augmenting additional limbs for the human body, however the grasp augmentation effect is limited. To address this problem, a maximum graspable sphere solution method based on SRF and hand pose is investigated to enhance the grasping ability, and the SRF design is optimized by quantitative analysis. Firstly, the D-H (Denavit-Hartenberg) kinematic models of the human hand and SRF are constructed, the finger pose library of the human hand and SRF is obtained by the Monte Carlo method, and an analytical method to achieve stable semi-envelope grasping of the sphere is proposed based on this library. Then, the grasp augmentation ability of SRF is defined and quantified based on the radius of the maximum graspable sphere of SRF and human hand, and the rod lengths of SRF at 3 wearing positions are optimized based on this ability. Finally, the SRF prototypes are built based on the subject’s hand size and the rod lengths at 3 wearing positions before and after optimization, with which the grasping experiments are carried out on spheres with radius of 2~12 cm. The experimental results show that the grasping abilities at the 3 wearing positions are enhanced by 42.4%, 38.5% and 7.91% respectively after rod length optimization, which proves the correctness and effectiveness of the solution method.Keywords:
-
References
[1] 荆泓玮, 朱延河, 赵思恺, 等. 外肢体机器人研究现状及发展趋势[J]. 机械工程学报, 2020, 56(7): 1-9. doi: 10.3901/JME.2020.07.001JING H W, ZHU Y H, ZHAO S K, et al. Research status and development trend of supernumerary robotic limbs[J]. Journal of Mechanical Engineering, 2020, 56(7): 1-9. doi: 10.3901/JME.2020.07.001[2] WU F Y. Supernumerary robotic fingers for single-handed grasping and manipulation assistance[D]. Cambridge, USA: Massachusetts Institute of Technology, 2017.[3] WU F Y, ASADA H H. “Hold-and-manipulate” with a single hand being assisted by wearable extra fingers[C]//IEEE International Conference on Robotics and Automation. Piscataway, USA: IEEE, 2015: 6205-6212. doi: 10.1109/ICRA.2015.7140070[4] HUSSAIN I, SALVIETTI G, SPAGNOLETTI G, et al. A soft supernumerary robotic finger and mobile arm support for grasping compensation and hemiparetic upper limb rehabilitation[J]. Robotics and Autonomous Systems, 2017, 93: 1-12. doi: 10.1016/j.robot.2017.03.015[5] KIELIBA P, CLODE D, MAIMON-MOR R O, et al. Robotic hand augmentation drives changes in neural body representation[J]. Science Robotics, 2021, 6(54). doi: 10.1126/scirobotics.abd7935[6] DONG H X, ASADI E, QIU C, et al. Geometric design optimization of an under-actuated tendon-driven robotic gripper[J]. Robotics and Computer-Integrated Manufacturing, 2018, 50: 80-89. doi: 10.1016/j.rcim.2017.09.012[7] KASHEF S R, AMINI S, AKBARZADEH A. Robotic hand: A review on linkage-driven finger mechanisms of prosthetic hands and evaluation of the performance criteria[J]. Mechanism and Machine Theory, 2020, 145. doi: 10.1016/j.mechmachtheory.2019.103677[8] KRAGTEN G A, HERDER J L. The ability of underactuated hands to grasp and hold objects[J]. Mechanism and Machine Theory, 2010, 45(3): 408-425. doi: 10.1016/j.mechmachtheory.2009.10.002[9] BOS R A, PLETTENBURG D H, HERDER J L. Simplifying models and estimating grasp performance for comparing dynamic hand orthosis concepts[J]. PloS ONE, 2019, 14(7). doi: 10.1371/journal.pone.0220147[10] LLOP-HARILLO I, PÉREZ-GONZÁLEZ A, ANDRÉS-ESPERANZA J. Anthropomorphism indexes of the kinematic chain for artificial hands[J]. Journal of Bionic Engineering, 2020, 17: 501-511. doi: 10.1007/s42235-020-0040-5[11] SUN B Y, GONG X, LIANG J, et al. Design principle of a dual-actuated robotic hand with anthropomorphic self-adaptive grasping and dexterous manipulation abilities[J]. IEEE Transactions on Robotics, 2022, 38(4): 2322-2340. doi: 10.1109/TRO.2021.3132532[12] SUI M L, OUYANG Y M, JIN H, et al. A soft-packaged and portable rehabilitation glove capable of closed-loop fine motor skills[J]. Nature Machine Intelligence, 2023, 5: 1149-1160. doi: 10.1038/s42256-023-00728-z[13] GE R P, LIU Y, YAN Z, et al. Design of a self-aligning four-finger exoskeleton for finger abduction/adduction and flexion/extension motion[C]//International Conference on Rehabilitation Robotics. Piscataway, USA: IEEE, 2023. doi: 10.1109/icorr58425.2023.10304720[14] CIULLO A S, FELICI F, CATALANO M G, et al. Analytical and experimental analysis for position optimization of a grasp assistance supernumerary robotic hand[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4305-4312. doi: 10.1109/LRA.2018.2864357[15] PRATTICHIZZO D, POZZI M, BALDI T L, et al. Human augmentation by wearable supernumerary robotic limbs: Review and perspectives[J]. Progress in Biomedical Engineering, 2021, 3(4). doi: 10.1088/2516-1091/ac2294[16] 国家市场监督管理总局, 国家标准化管理委员会. 成年人手部尺寸分型: GB/T 16252-2023[S]. 北京: 中国标准出版社, 2023.State Administration for Market Regulation, Standardization Administration. Hand sizing system of adults: GB/T 16252-2023[S]. Beijing: Standards Press of China, 2023.[17] YANG W Z, WU X L, ZHANG H. Workspace modeling and analysis for dexterous hands[J]. International Journal of Humanoid Robotics, 2015, 12(1). doi: 10.1142/S0219843615500061[18] ZHANG X Y, LI H Y, ZHANG B, et al. Kinematics analysis and grasping simulation of a humanoid underactuated dexterous hand[C]//IEEE International Conference on Robotics and Biomimetics. Piscataway, USA: IEEE, 2021: 55-60. doi: 10.1109/robio54168.2021.9739457[19] BULLOCK I M, FEIX T, DOLLAR A M. Analyzing human fingertip usage in dexterous precision manipulation: Implications for robotic finger design[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, USA: IEEE, 2014: 1622-1628. doi: 10.1109/IROS.2014.6942772[20] CUI J, YAN S B, HU J, et al. A metric to design spring stiffness of underactuated fingers for stable grasp[J]. Robotics and Autonomous Systems, 2018, 102: 1-12. doi: 10.1016/j.robot.2018.01.001[21] LIOW L, CLARK A B, ROJAS N. OLYMPIC: A modular, tendon-driven prosthetic hand with novel finger and wrist coupling mechanisms[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 299-306. doi: 10.1109/LRA.2019.2956636[22] VOTTA A M, GÜNAY S Y, ZYLICH B, et al. Kinematic optimization of an underactuated anthropomorphic prosthetic hand[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, USA: IEEE, 2020: 3397-3403. doi: 10.1109/iros45743.2020.9341640 -
Related Articles
-