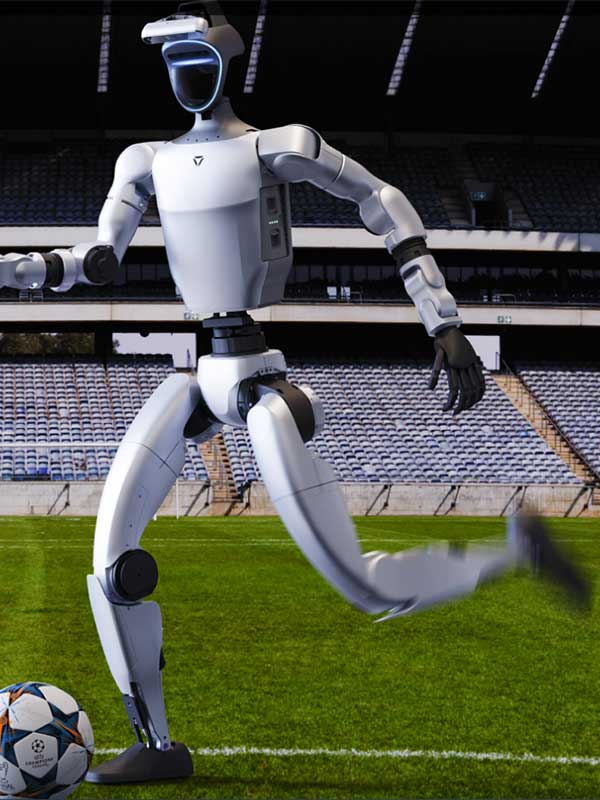

Unitree G1-Comp Football Icon Designed for Competitions
The global high performance quadruped robot industry pioneer, the global quadruped robot industry application leader.
-
Stable and Resilient, Unperturbed by Distractions
Featuring industry-leading motion control systems, designed to excel in competitive match environments
-
Agility and superior strength
Based on the Yolo 11 network algorithm, rapid identification of the stadium environment and accurate positioning are achieved
-
unitree_rl_gym
reinforcement learning framework
Efficient Simulation Environment: Integrate simulation tools such as Isaac Gym and Mujoco to provide efficient physical simulation capabilities.
Flexible Training Configuration: Users can adjust training parameters through the configuration file, such as the number of environments, random seeds, maximum number of iterations, etc.
Complete Training Process: Supports the entire process from simulation training (Sim2Sim) to real robot deployment (Sim2Real).
-
RoboCup SDK
Development Guide
Visual Recognition API: Built-in YOLO11 latest generation real-time target detection algorithm, providing a rich stadium information interface.
Spatial Positioning API: Provides an accurate stadium position information interface through monocular geometric positioning and binocular depth positioning.
Motion Control API: Provide various motion control interfaces to the decision system based on visual detection results, venue information, competition rules, etc.
Unitree G1-Comp

Unitree G1-Comp
Building the Future Together, Fighting the Race
-
API
High-level operation control interface, Low-level operation control interface
Status service interface, DDS communication interface
Audio Lighting Service Interface
-
Simulation Environment
Isaac gym
Mujoco
-
Multimodal Interaction
UnifoLM Large Model
Support TTS, ASR
Support Yolo Recognition Algorithm
-
ROS Support
Compatible with ROS Ecosystem
-
APP Support
Quickly Configure Robots and View Status
-
Develop Computing Unit
Jetson Orin NX
Provides 100TOPS AI computing power
-
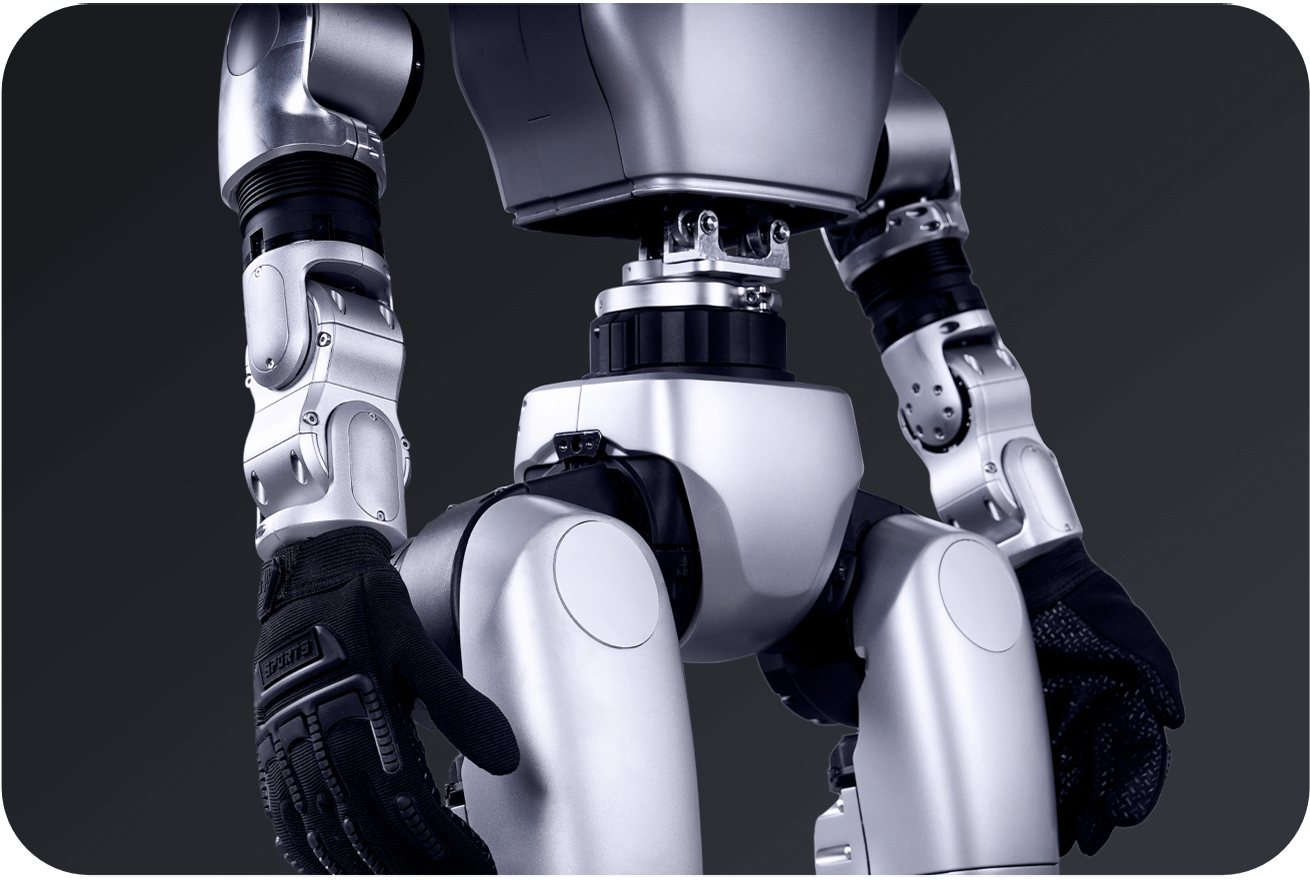
Dual Encoder
Accurate and stable, no fear of interference

-
Strong and Durable
The shell is covered with aluminum alloy
and high-strength engineering plastics
-
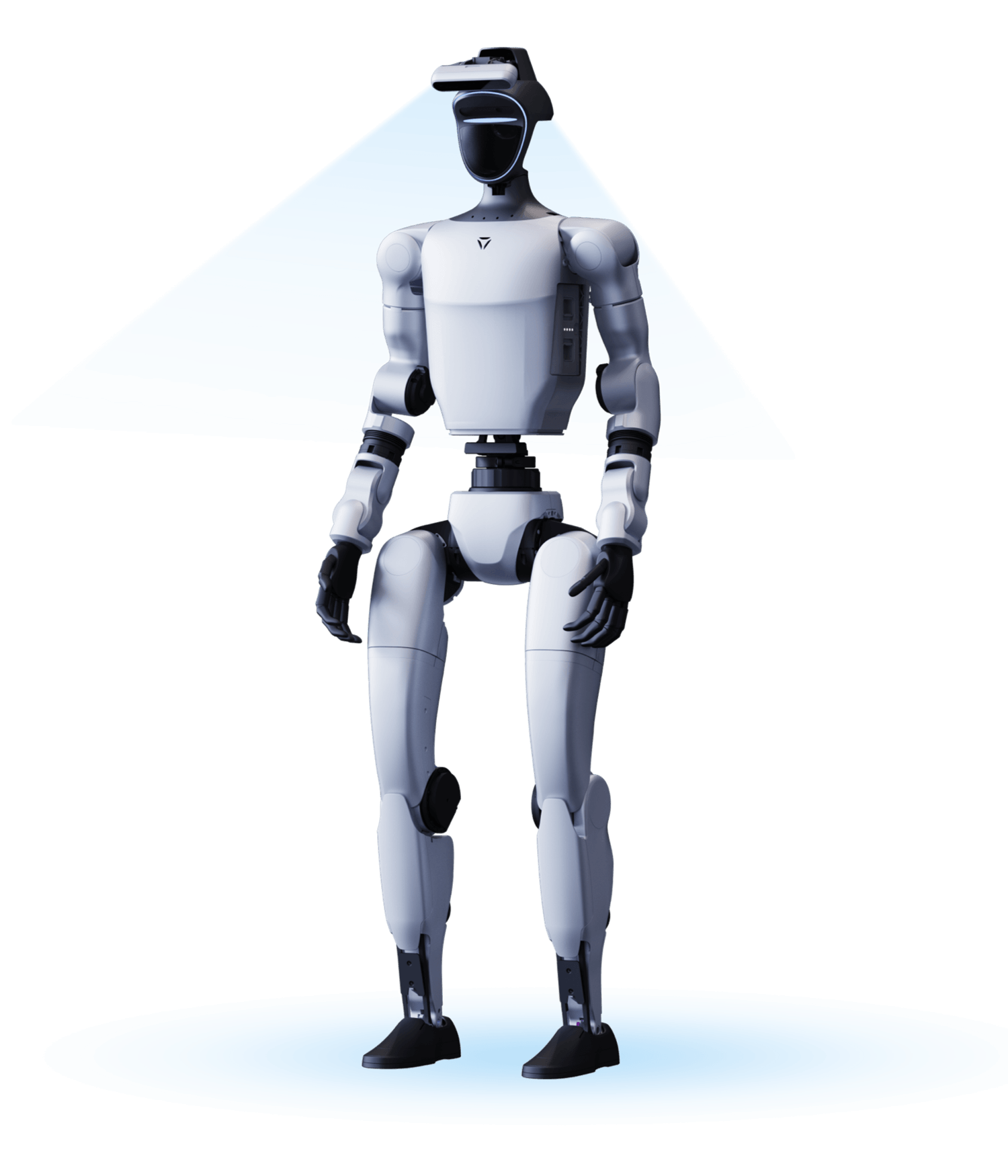
Body Size
Weight about 35kg
Height about 130cm
-
Battery Life
About 2 hours, supports quick change and fast charging

-
Model: G1 Comp
-
Height, Width and Thickness(Stand):1320x450x200mm
-
Height, Width and Thickness(Fold): 690x450x300mm
-
Weight (With Battery): About 35kg+
-
Total Degrees of Freedom(Joint Freedom):25-45
-
Single Leg Degrees of Freedom: 6
-
Waist Degrees of Freedom: 1+(Optional 2 additional waist degrees of freedom)
-
Single Arm Degrees of Freedom: 5
-
Head 2 degrees of freedom: 2
-
Single Hand Degrees of Freedom:
7(Optional Force control of three-fingered hand)+2(Optional 2 additional wrist degrees of freedom)
*Three-fingered dexterous hand Dex3-1 Parameter: The thumb has 3 active degrees of freedom; the index finger has 2 active degrees of freedom; the middle finger has 2 active degrees of freedom.
**Dex3-1 can optionally be installed with tactile sensor arrays
-
Maximum Torque of Knee Joint【1】:120N.m
-
Arm Maximum Load【2】:About 3Kg
-
Calf + Thigh Length: 0.6M
-
Arm Span: About 0.45M
-
Extra Large Joint Movement Space
Waist joint:Z±155°、X±45°、Y±30
Knee joint:0~165°
Hip joint:P±154°、R-30~+170°、Y±158°
Wrist joint:P±92.5°、Y±92.5°
-
Full Joint Hollow Electrical Routing
YES
-
Joint Encoder
Dual encoder
-
Cooling System
Local air cooling
-
Power Supply
13 string lithium battery
-
Basic Computing Power
8-core high-performance CPU
-
Sensing Sensor
Depth camera、3D LiDAR
-
4 Microphone Array
YES
-
5W Speaker
YES
-
WiFi 6 、Bluetooth 5.2
YES
-
High Computing Power Module
NVIDIA Jetson Orin
-
Smart Battery (Quick Release)
9000mAh
-
Charger
54V 5A
-
Manual Controller
YES
-
Battery Life
About 2h
-
Upgraded Intelligent OTA
YES
-
Secondary Development【3】
YES
-
Price(Tax and Shipping cost excluded)
Contact sales
[1]
The maximum torque of the joint motors of the whole machine is different. This is the maximum torque of the largest joint motor among them.
[2]
The maximum load of the arm varies greatly under different arm extension postures.
[3]
For more information, please read the secondary development manual.
[4]
The above parameters may vary in different scenarios and configurations, please subject to actual situation.
[5]
The humanoid robot has a complex structure and extremely powerful power. Users are asked to keep a sufficient safe distance between the humanoid robot and the humanoid robot.Please use with caution
[6]
If any change in the appearance of the product, please refer to the actual product.
[7]
Some sample functions on this page are still being developed and tested, and will be opened to users in the future.
[8]
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
[9]
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.



