Unitree H1 / H1-2Unitree’s first universal humanoid robot

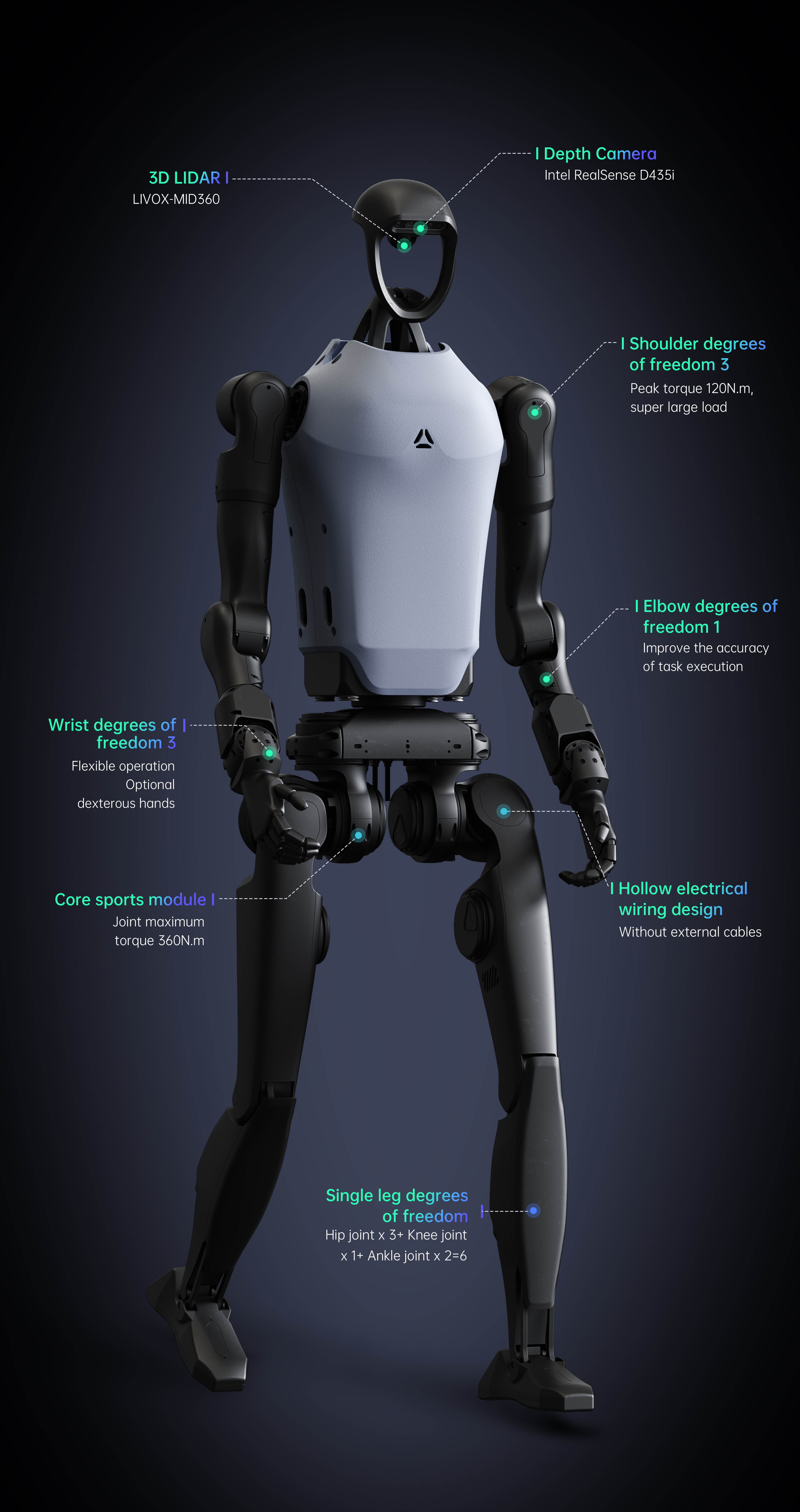
Equipped with 3D LiDAR + depth camera, real-time acquisition of high-precision spatial data to achieve panoramic scanning.
Unitree H1 Full-size universal humanoid robot
-
Body Size Value
Height about 180CM
Weight about 47kg
-
Peak Torque Density
189N.m/Kg
-
Mobility
Moving speed of 3.3m/s
Potential mobility > 5m/s
-
Endurance
Battery capacity: 864Wh,
quickly replaceable
-
Maximum Joint Torque
360N.m
-
360° Depth Sensing
3D LIDAR
+ Depth Camera
Unitree H1-2
Full-size universal humanoid robot
-
Body Size Value
Height about 178CM
Weight about 70kg
-
360° Depth Sensing
3D LIDAR
+ Depth Camera
-
Degree of freedom
27
-
Maximum Torque of Arm Joint
120N.m
-
Maximum Torque of Leg Joint
360N.m
-
Peak Torque Density
189N.m/Kg
H1 Parameter

Super powerful power performance, significantly improved in terms of agility,
speed, load capacity, endurance, and more
M107 PK International mainstream joint motor
-
Product

M107
T-1
T-2
-
Maximum torque OR pulling force
(3.5cm arm equivalent)
360N.m
10000N
180N.m
8000N
-
Weight
1.9kg
2.26kg
2.2kg
-
Maximum Torque or Tension/Weight Ratio
189
5263
79
3636
-
Hollow shaft
YES
YES
–
-
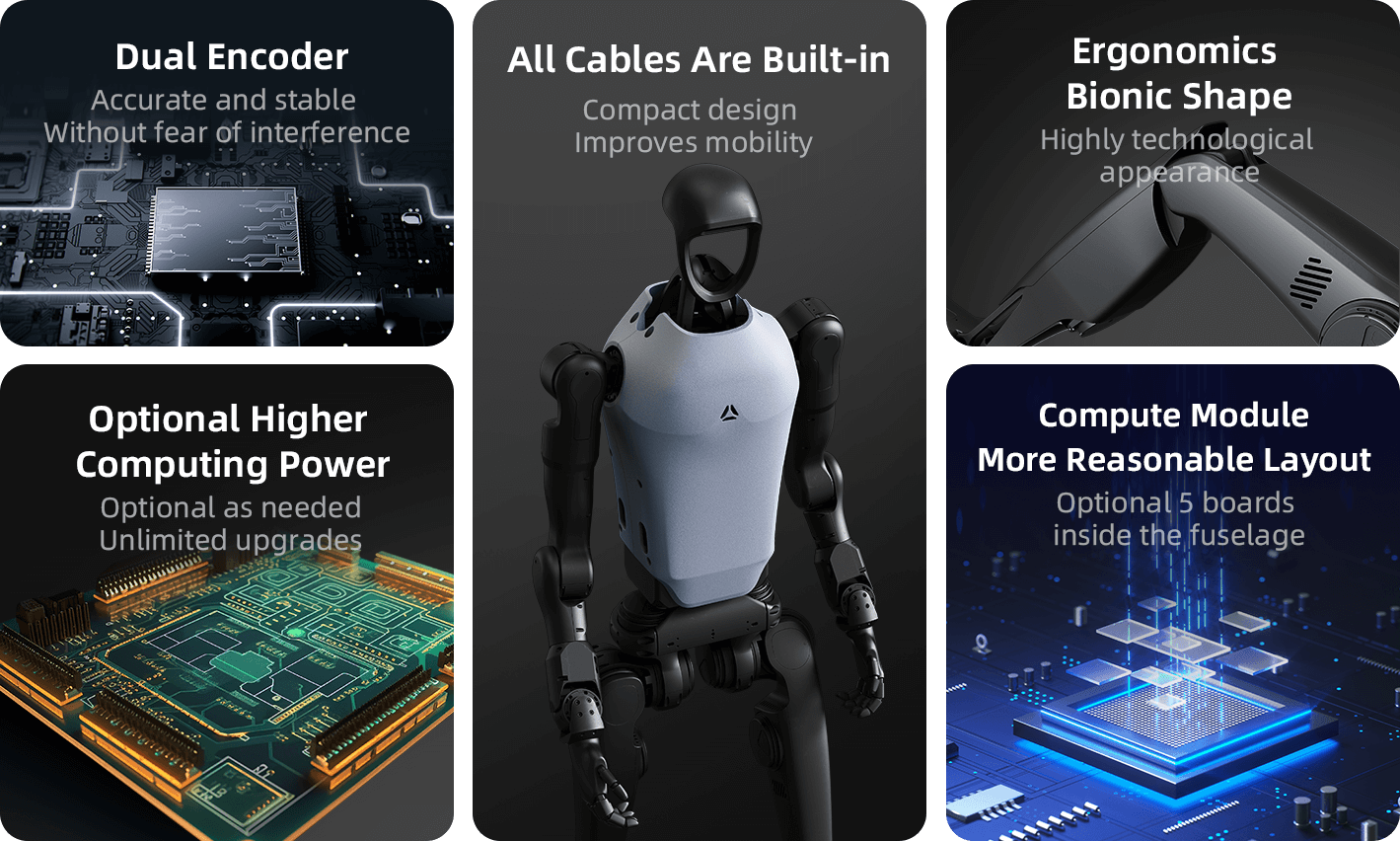
Dual Encoder
YES
YES
YES
-
Dimensions(mm)
107 × 74
100 × 130
60 × 180
-
H1

-
H1-2
-
Key Dimensions
(1520+285)mm × 570mm × 220mm
(1503+285)mm × 510mm × 287mm
-
Thigh and Calf Length
400mm × 2
400mm × 2
-
Total Arm Length
338mm × 2
685mm
-
DOF of Each Leg
5(Hip × 3 + Knee × 1 + Ankle × 1)
6(Hip x 3 + Knee x 1 + Ankle x 2)
-
DOF of Each Arm
4(Expandable)
7(Shoulder x 3 + Elbow x 1 + Wrist x 3)
-
Total Weight
About 47kg
About 70kg
-
Joint output bearing
Industrial grade crossed roller bearings (high precision, high load capacity)
Industrial grade crossed roller bearings (high precision, high load capacity)
-
Core Joint motor
Low inertia high-speed internal rotor PMSM
(permanent magnet synchronous motor,better response speed and heat dissipation)
Low inertia high-speed internal rotor PMSM
(permanent magnet synchronous motor,better response speed and heat dissipation)
-
Ultimate Torque of Joint Unit
Knee Torque About 360N.m,Hip Joint Torque About 220N.m,
Ankle Torque About 59N.m,Arm Joint Torque About 75N.m
Knee Torque About 360N.m,Hip Joint Torque About 220N.m,
Waist Joint About 220N.m, Ankle Joint About 75x2N.m.
-
Mobility
Moving speed of 3.3m/s(world record),
Potential mobility > 5m/s
Moving speed <2m/s
-
Battery
Battery capacity 15Ah(0.864KWh),Max Voltage 67.2V
Battery capacity 15Ah(0.864KWh),Max Voltage 67.2V
-
Control and Perception Computing Power
Standard configuration: Intel Core i5(Platform Function) ,Intel Core i7(User Development)
Optional Configuration: Intel Core i7 or Nvidia Jetson Orin NX
Standard configuration: Intel Core i5(Platform Function) ,Intel Core i7(User Development)
Optional Configuration: Intel Core i7 or Nvidia Jetson Orin NX (up to three)
-
Sensor Configuration
3D LIDAR + Depth Camera
3D LIDAR + Depth Camera
-
Dexterous Hand
Optional
Optional RH56 or other ambidextrous hands
-
Arm joint performance
(peak torque)/Shoulder: About 120N.m, Elbow: About 120N.m
Wrist: About 30N.m
-
Arm normal load
/Peak: About 21Kg; Rated: About 7Kg
*Note: The product continues to iterate and optimize, please refer to the actual receipt of the goods prevail.
*The appearance of the shipping version may be different from that of the official website version. If you are concerned about the appearance details, please communicate with the sales staff before purchasing.
*There are parameter differences between different products, please choose according to your needs.
*This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
*Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.